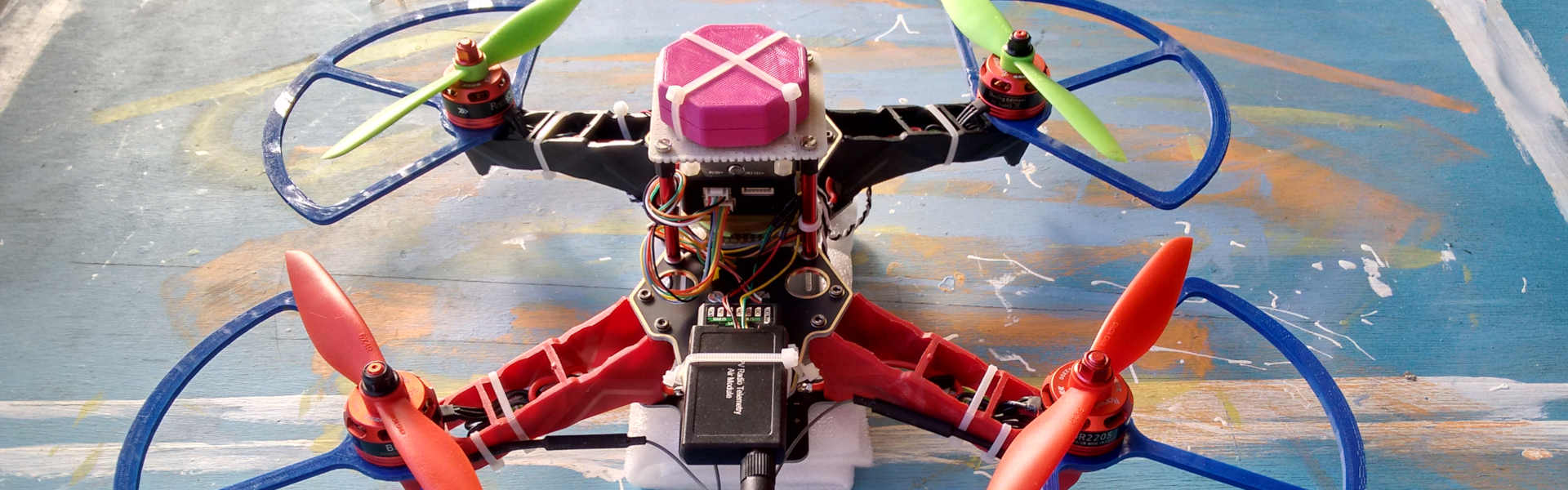
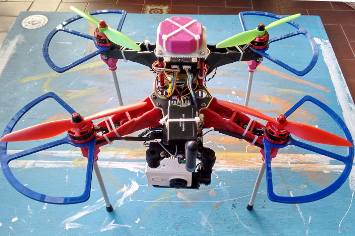
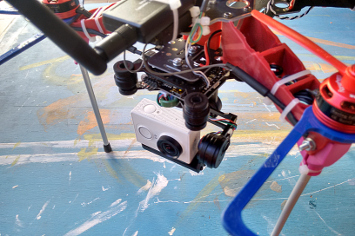
Oltre ai sensori inerziali del flight controller, usa un modulo GPS per modalità di volo autonoma outdoor: waypoint mission, follow me, dronie.
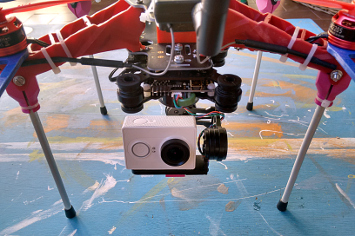
Monta anche un gimbal per la camera per la fotografia aerea stabilizzata.

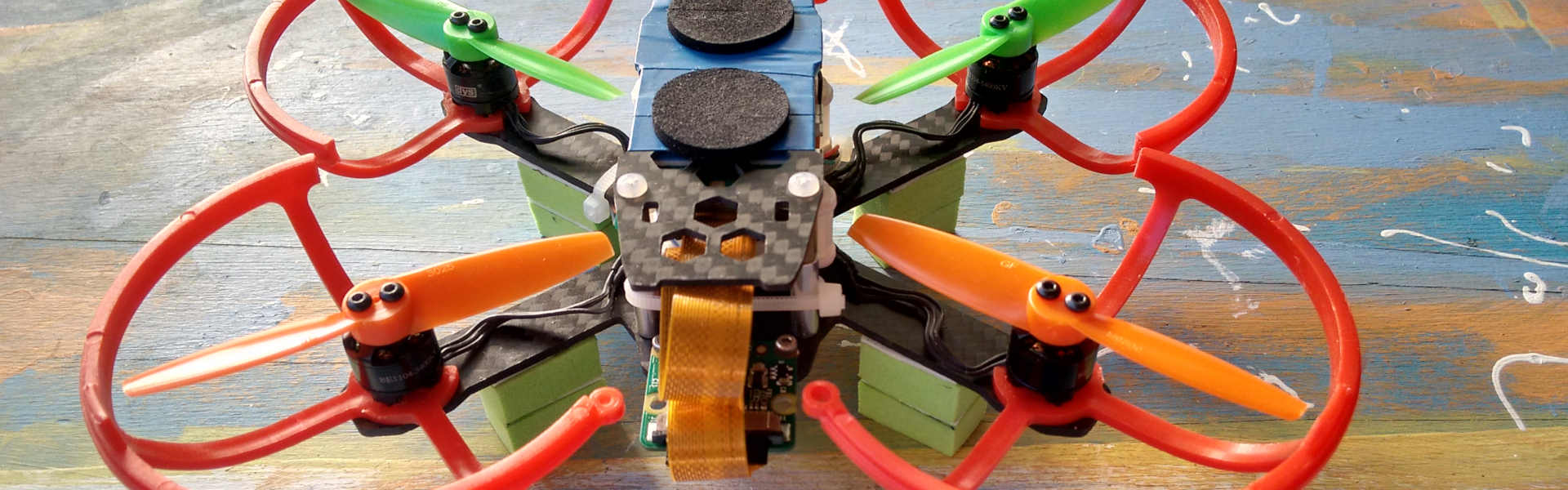
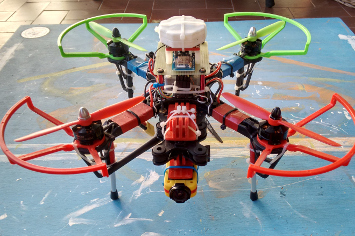
Oltre ai sensori inerziali del flight controller, usa un modulo GPS per modalità di volo autonoma outdoor e un video TX radio a 5.8GHz per volo in FPV (First Perso View).

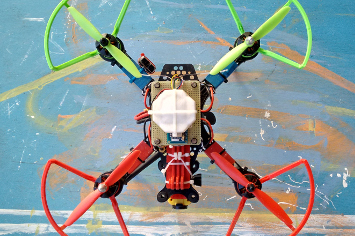
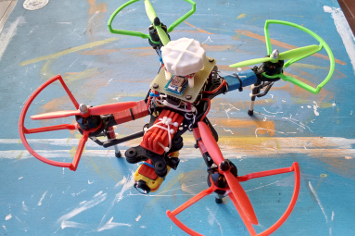
Oltre ai sensori inerziali del flight controller, usa una camera che riconoscendo i marker della realtà aumentata consente di volare in modalità autonoma indoor. Per realizzare questo vengono usati il ROS Ardupilot e mavros che costituisce il collante tra questi due importanti sistemi open source usati per la robotica nella maggior parte delle università e dei centri di ricerca mondiali.
Si tratta di tre droni autocostruiti che utilizzano l'autopilota open-source Ardupilot.
E' stata data preferenza a Hardware e Software Open Source, quando possibile.
In collaborazione con il FabLab di HackLab Terni.
"Ardupilot is the most advanced, full-featured and reliable open source autopilot software available. It has been developed over 5+ years by a team of diverse professional engineers and computer scientists. It is the only autopilot software capable of controlling any vehicle system imaginable, from conventional airplanes, multirotors, and helicopters, to boats and even submarines. And now being expanded to feature support for new emerging vehicle types such as quad-planes and compound helicopters."

"The Robot Operating System (ROS) is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms."